PinnedRyan SanderinTowards Data ScienceIntroduction to Experience Replay for Off-Policy Deep Reinforcement LearningExploring a crucial mechanism for improving the sample efficiency of deep reinforcement learning agents·9 min read·Jul 7, 2022--2--2
PinnedRyan SanderLearning NMF Through A Toy ExampleLearning the mechanisms of the NMF update rule through a mathematical example.·4 min read·May 11, 2022----
PinnedRyan SanderinTowards Data ScienceDeep Neural Networks vs. Gaussian Processes: Similarities, Differences, and Trade-OffsIn this article, we explore Deep Neural Networks and Gaussian Processes through comparative, theoretical, and applied lenses.·10 min read·Sep 17, 2021--2--2
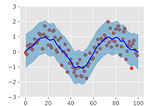
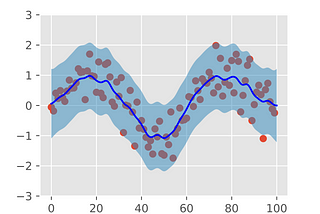
PinnedRyan SanderinTowards Data ScienceGaussian Process Regression From First PrinciplesGaussian Process Regression is a remarkably powerful class of machine learning algorithms. Here, we introduce them from first principles.·16 min read·Mar 15, 2021--2--2
PinnedRyan SanderinTowards Data ScienceA Bayesian Take On Model RegularizationIn this article, we explore how we can, and do, regularize and control the complexity of the models we learn through Bayesian prior…·10 min read·Feb 1, 2021--2--2
Ryan SanderPaper Review: G-Mixup: Graph Data Augmentation for Graph ClassificationIn this quick review, we’ll talk about G-Mixup, a novel data augmentation mechanism that improves the generalizability of GNNs.·4 min read·Jun 7, 2022----
Ryan SanderPaper Review: Vector-Quantized Variational Autoencoder (VQ-VAE)In this quick review, we’ll be talking about VQ-VAE, a novel autoencoder model that improves reconstruction and compression.·3 min read·Apr 9, 2022--1--1
Ryan SanderQuick Paper Review: Manifold MixupIn this article, we briefly explore Manifold Mixup, a novel and lightweight generalization technique.·2 min read·Dec 1, 2021--1--1
Ryan SanderinTowards Data ScienceModern Gaussian Process RegressionGaussian Process Regression coupled with modern computing enables for near-real-time, scalable, and sample-efficient prediction.·10 min read·Mar 24, 2021--3--3
Ryan SanderinTowards Data ScienceReal Life Meta-Learning: Teaching and Learning to LearnTeaching and learning are two incredibly crucial skills we use throughout our lives. Let’s learn how to optimize these skills!·12 min read·Mar 19, 2021----